城图科技携自研GIS平台,参加地面无人车系统挑战赛
背景介绍
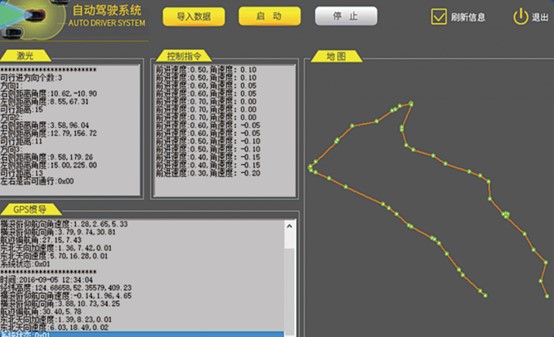
由某部主办的“跨越险阻2016”地面无人系统挑战赛,在某研究所黑龙江塔河试验站拉开帷幕。来自国内44家军内外知名院校、 科研院所、国有企业、民营企业,报名参加了本届挑战赛。我公司与某研究所合作,结合我司自主研发的Easy GIS平台,参与了无人车导航研发, 利用无人车上的激光雷达和GPS惯导采集信号数据分析计算后进行自助避障导航驾驶。我方无人车第一次参加15公里林地无人驾驶挑战赛,就取得了不错的名次, 达到了预期的目标,圆满完成了下达的比赛任务。
比赛过程中无人车从起点出发后,按任务文件指定的路线行进,到达侦察区后,自主收集目标照片信息,然后行驶至终点停车,全程10~15Km。GPS导航模块需要对无人车实时提供车体期望航向角,基于此期望航向角激光雷达通过对周围道路和障碍物的识别以及视觉辅助为GPS导航模块提供可通行航向角,由GPS综合各方面信息后,进行车体控制。整个过程GPS除提供期望航向信息外,还需要对走错路、路径死循环等意外情况进行处理。



功能指标要求
“跨越险阻2016”视觉模块应具有以下功能:
1) 提供当前车体位姿、速度等信息;
2) 根据车体当前位置和任务点信息,提供期望航向角信息,航向角为车体坐标系下的航向角信息;
3) 提供偏离正确轨道的修正,包括错误路径下的回退与回退后的重新导航;
4) GPS导航模块,综合激光雷达提供的最佳通信角信息和最小障碍物相对位置信息后,对车体进行直接控制;
5) GPS导航模块处理时间要小于0.1s,以10Hz频率向外输出车体位姿、速度信息,并以10Hz频率下发车体控制信息。